| メーカー | 株式会社北川鉄工所 |
| 分類 | ロボットハンド・グリッパ |
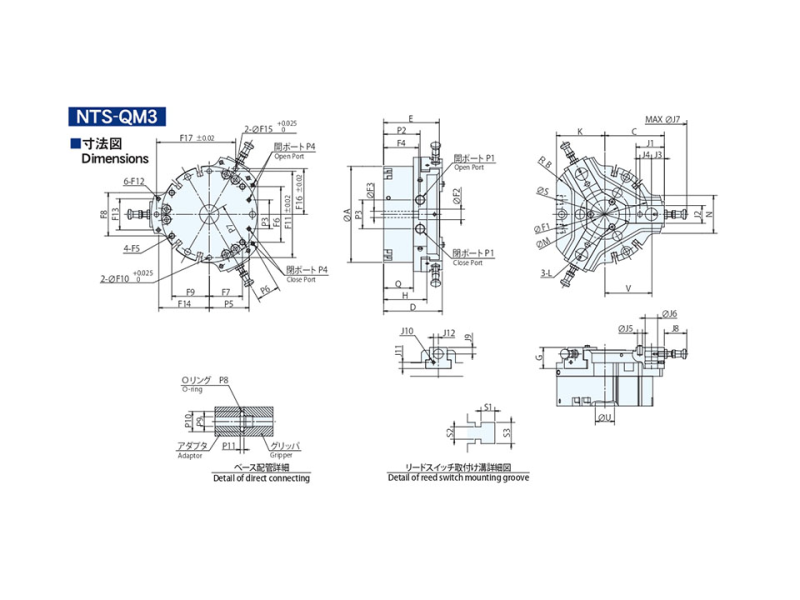
| 製品名 | NTS-QM311 |
外形寸法A (mm) | φ100 |
外形寸法B (mm) | 60.5 |
外形寸法C (mm) | 62 |
外形寸法D (mm) | 61 |
外形寸法E (mm) | 58 |
外形寸法G (mm) | 22 |
外形寸法H (mm) | 45 |
外形寸法K (mm) | 50.5 |
外形寸法L (mm) | M3 |
外形寸法M (mm) | φ30 |
外形寸法N (mm) | 39.5 |
外形寸法Q (mm) | 31 |
外形寸法S (mm) | φ52 |
外形寸法T (mm) | φ10×d17 |
外形寸法U (mm) | φ20×d3.5 |
外形寸法V (mm) | 38.5~48.5 |
ジョー取付け部寸法J1
(mm) | 29.5 |
ジョー取付け部寸法J2
(mm) | 18.5 |
ジョー取付け部寸法J3
(mm) | 13.5(±0.05) |
ジョー取付け部寸法J4
(mm) | 12 |
ジョー取付け部寸法J5
(mm) | φ5×H2 |
ジョー取付け部寸法J6
(mm) | 13 |
ジョー取付け部寸法J7
(mm) | φ181.6 |
ジョー取付け部寸法J8
(mm) | 23.3~28.3 |
ジョー取付け部寸法J9
(mm) | 6.8 |
ジョー取付け部寸法J10
(mm) | M3×d3.5 |
ジョー取付け部寸法J11
(mm) | 6.5 |
ジョー取付け部寸法J12
(mm) | 5 |
本体固定部寸法F1
(mm) | φ90 |
本体固定部寸法F2
(mm) | φ11 |
本体固定部寸法F3
(mm) | φ6.6 |
本体固定部寸法F4
(mm) | 36.5 |
本体固定部寸法F5
(mm) | M6×d9 |
本体固定部寸法F6
(mm) | 57.9 |
本体固定部寸法F7
(mm) | 34.5 |
本体固定部寸法F8
(mm) | 45 |
本体固定部寸法F9
(mm) | 39 |
本体固定部寸法F10
(mm) | φ5(+0.025)×d10 |
本体固定部寸法F11
(mm) | 90(±0.02) |
本体固定部寸法F12
(mm) | M4×d7 |
本体固定部寸法F13
(mm) | 32.5 |
本体固定部寸法F14
(mm) | 53 |
本体固定部寸法F15
(mm) | φ5(+0.025)×d5 |
本体固定部寸法F16
(mm) | 47.631(±0.02) |
本体固定部寸法F17
(mm) | 82.5(±0.02) |
空圧供給部寸法P1
(mm) | G1/8 |
空圧供給部寸法P2
(mm) | 38 |
空圧供給部寸法P3
(mm) | 30.1 |
空圧供給部寸法P4
(mm) | M4 |
空圧供給部寸法P5
(mm) | 41.35 |
空圧供給部寸法P6
(mm) | 24 |
空圧供給部寸法P7
(mm) | 49 |
空圧供給部寸法P8
(mm) | S6(NOK規格) |
空圧供給部寸法P9
(mm) | φ4 |
空圧供給部寸法P10
(mm) | φ8.3 |
空圧供給部寸法P11
(mm) | 1 |
スイッチ取付け部寸法(リードスイッチ)S1
(mm) | 3.6 |
スイッチ取付け部寸法(リードスイッチ)S2
(mm) | 3.2 |
スイッチ取付け部寸法(リードスイッチ)S3
(mm) | 5.5 |
ジョーストローク(直径)
(mm) | 20 |
把持力(測定距離)
(mm) | 20 |
把持力(外径把握)
(N) | 1810 |
把持力(内径把握)
(N) | 1930 |
繰り返し精度
(mm) | -0.02~0.02 |
本体質量 (kg) | 1.29 |
流体消費量 (cm3/往復) | 112 |
使用空圧力 (MPa) | 0.2~0.8 |
許容ジョー質量(ロボット加速度3m/s2)
(g) | 240 |
許容ジョー質量(ロボット加速度6m/s2)
(g) | 210 |
許容ジョー質量(ロボット加速度10m/s2)
(g) | 150 |
周囲温度 (℃) | 5~60 |
備考 | ・外形寸法Uは、H8です。
・ジョー取付け部寸法J5は、g6です。
・ジョー取付け部寸法J6は、H7です。
・ジョー取付け部寸法J7は最高値です。
・把持力は、供給空圧力0.6MPaでの値です。
・繰り返し精度は、参考値です。 |
| メーカーHP | |